Selected Projects
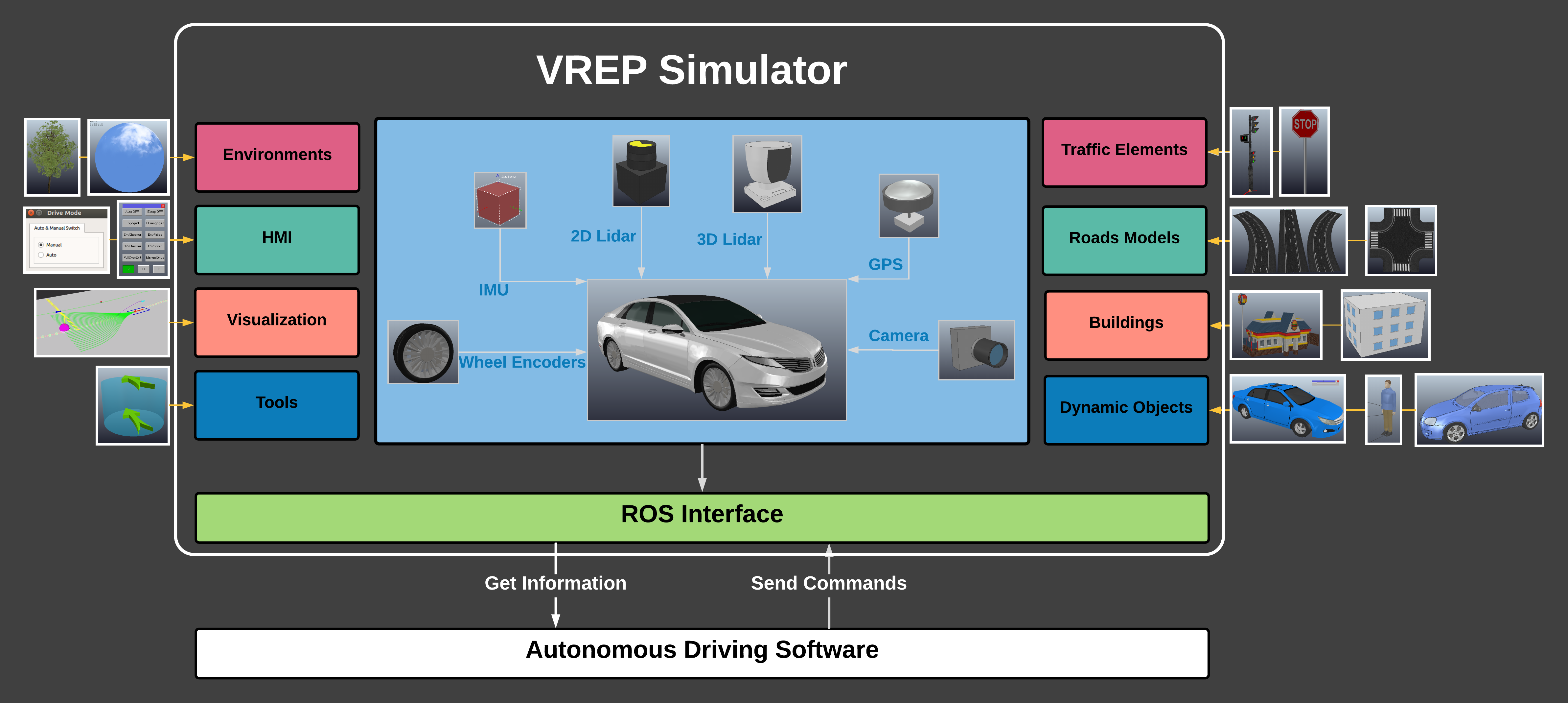
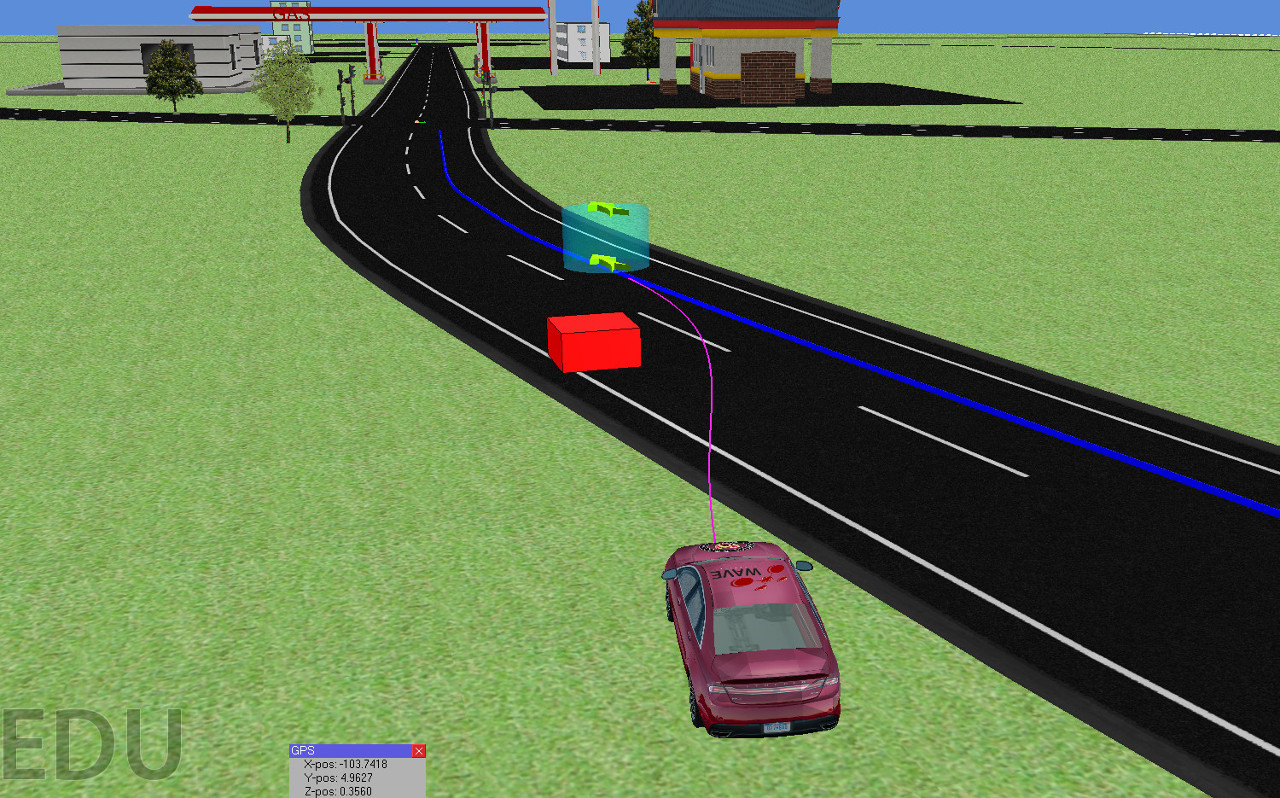
Lightweight and Flexible Simulation Toolset for Autonomous Driving
A summary of my simulation work for supporting the development of motion planning algorithms.
Hybrid Motion Planning for Autonomous Driving
HMPL is a real-time C++ motion planning library for autonomous driving that is able to handle task constraints, geometry constraints, nonholonomic constraints and dynamics constraints of cars in a human-like and layered fasion.
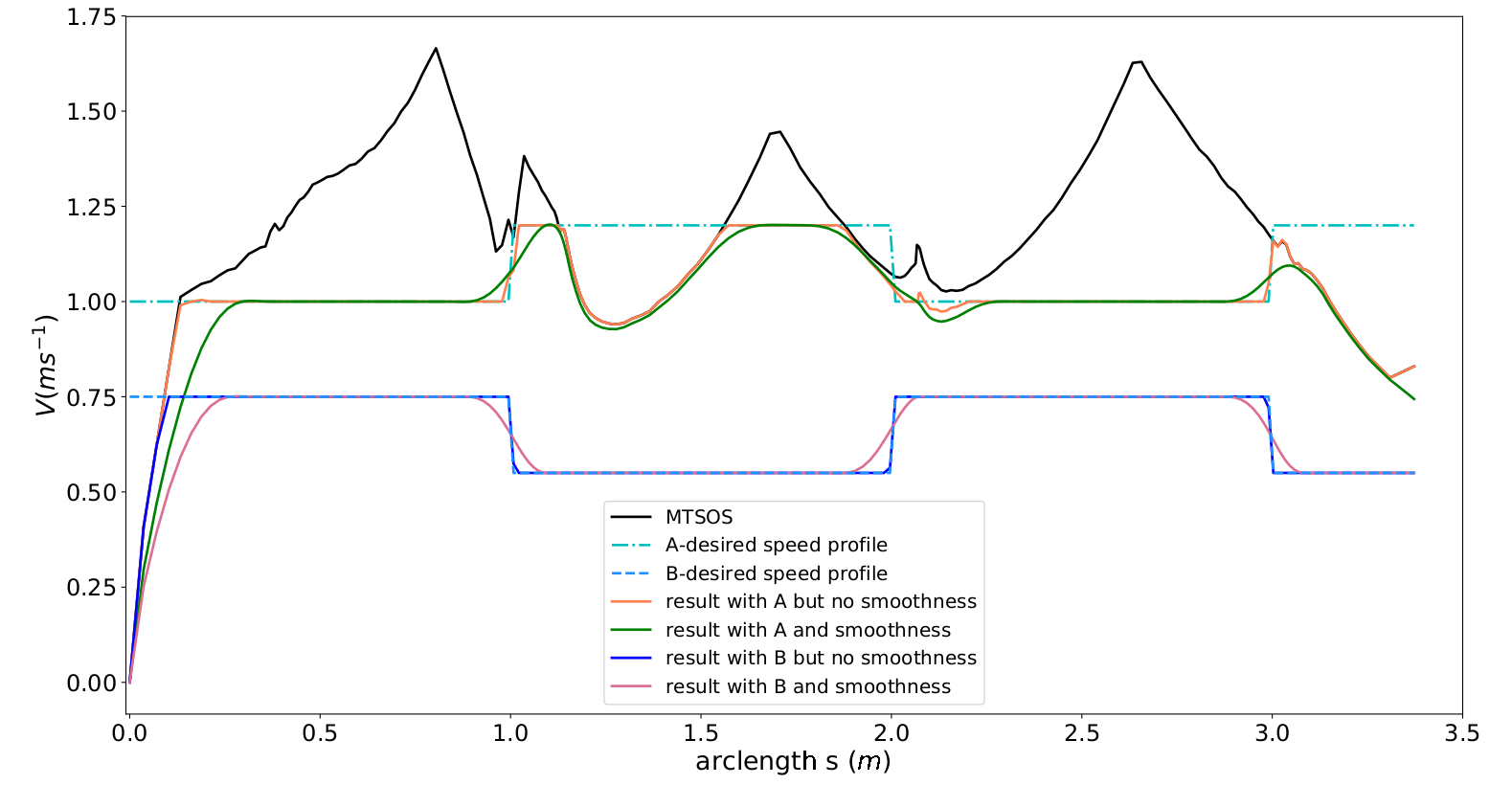
Convex-optimization-based Speed Planning for Autonomous Driving
Speed planning plays an important role in guaranteeing the ride comfort and safety in autonomous driving applications. To address this problem, we develop a complete, flexible, safe, and globally-optimal convex-optimization-based method to solve speed planning problems over a fixed path for autonomous driving in both static and dynamic environments.
Previous Projects

Unmanned Ground Vehicle Challenge 2014
We won the second place in ‘Kua Yue Xian Zu’ Unmannded Ground Vehicle Challenge 2014.

China Intelligent Vehicle Future Challenge 2013
We won the championship in China Intelligent Vehicle Challenge 2013.

Previous Projects Portfolio
Past projects related to autonomous systems that I get involved in. Please find the brief introductions on my old website.